Variational Bayes for Intent Recognition
A self-defined optimization course project that uses Variational Bayes to infer a targeted base from GGIW estimates on a non-cooperative vehicle.
Overview
The optimization course taught a lot of methods for iteratively pursuing optimal solutions. To prove we learned a sufficient amount of knowledge, the instructor gave us a final project where we could pick our own topic. Needless to say, most of my research to this point had not been in optimal design, so I decided to pursue a different route: statistical optimization. Using Variational Bayes, one can approximate a distribution as opposed to solving for a full joint posterior.
The approximation follows by optimizing the Evidence Lower Bound (ELBO): $$ \mathcal{L}(q) = \mathbb{E}_q \left[\log p(\xi,e)\right] - \mathbb{E}_q \left[\log q(\xi)\right] $$ In this representation, $\xi$ is the latent-variable set while $e$ is the evidence set.
Technical Approach
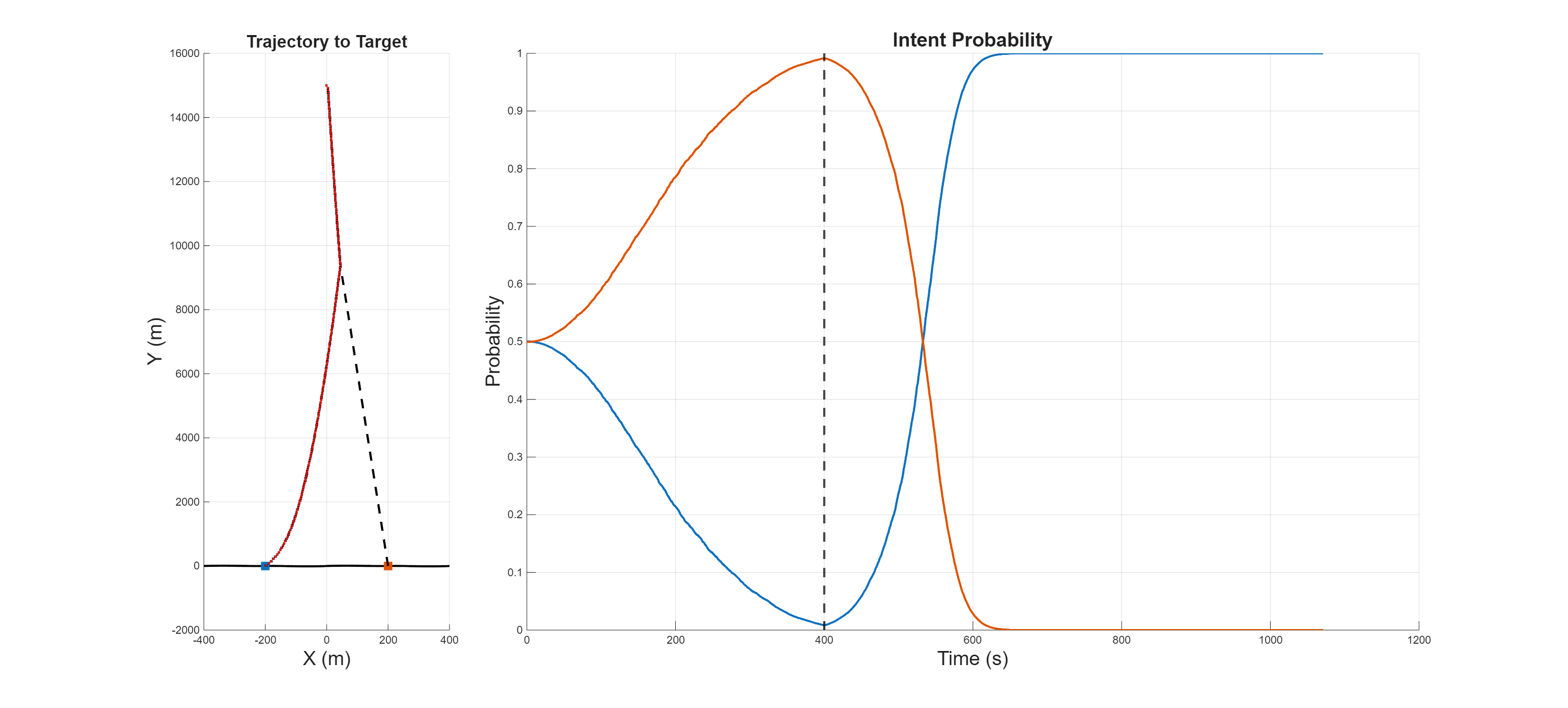
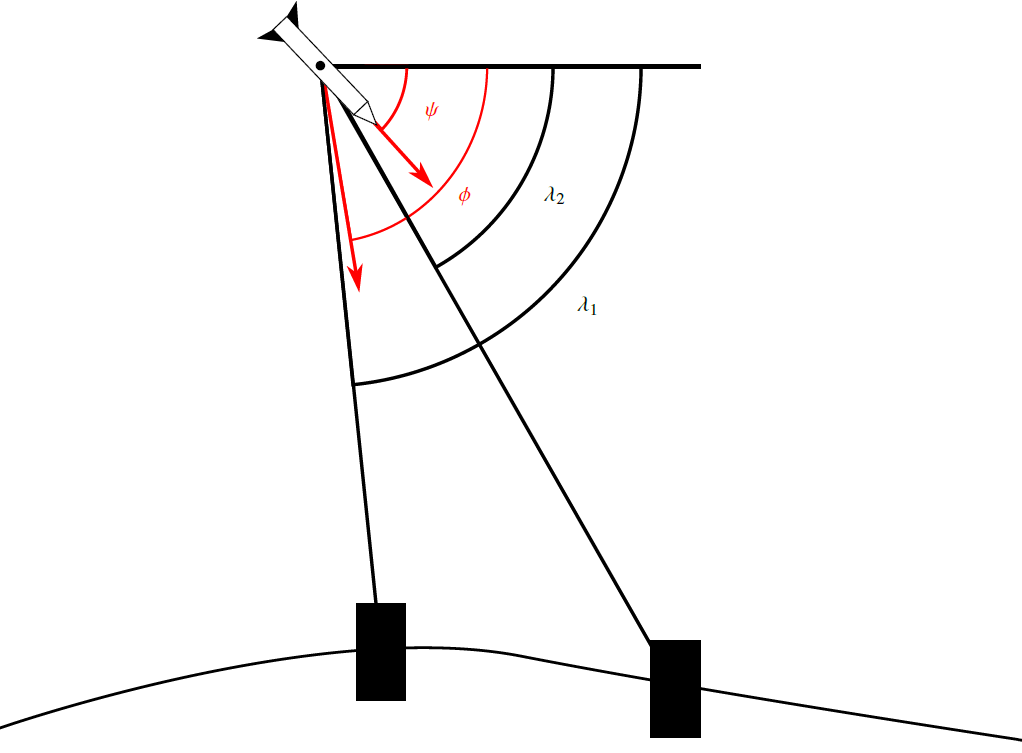
A maneuvering vehicle was simulated guiding itself to a specific base, while 2D point measurements were sampled around its truth location with a long axis defined. Then, GGIW filtering was run on these measurements to acquire estimates. Finally, the GGIW gave long-axis orientation and kinematic position and velocity. The position was used to define line-of-sight (LOS) vectors/angles to candidate locations which could then be compared with the orientation and velocity direction.
The underlying assumption was that a true LOS was being targeted, and we must infer which LOS vector out of the candidate locations is most probable given the velocity and orientation. This was done by constructing the errors between the LOS and the velocity and heading angles, assuming them to be zero-mean gaussian, and weighting the variances of each measurement source as a function of range. Then the measured errors were evaluated and scored which candidate base was most probable.
Outcomes
- Acquired Coordinate-Ascent Variational Inference recursion steps.
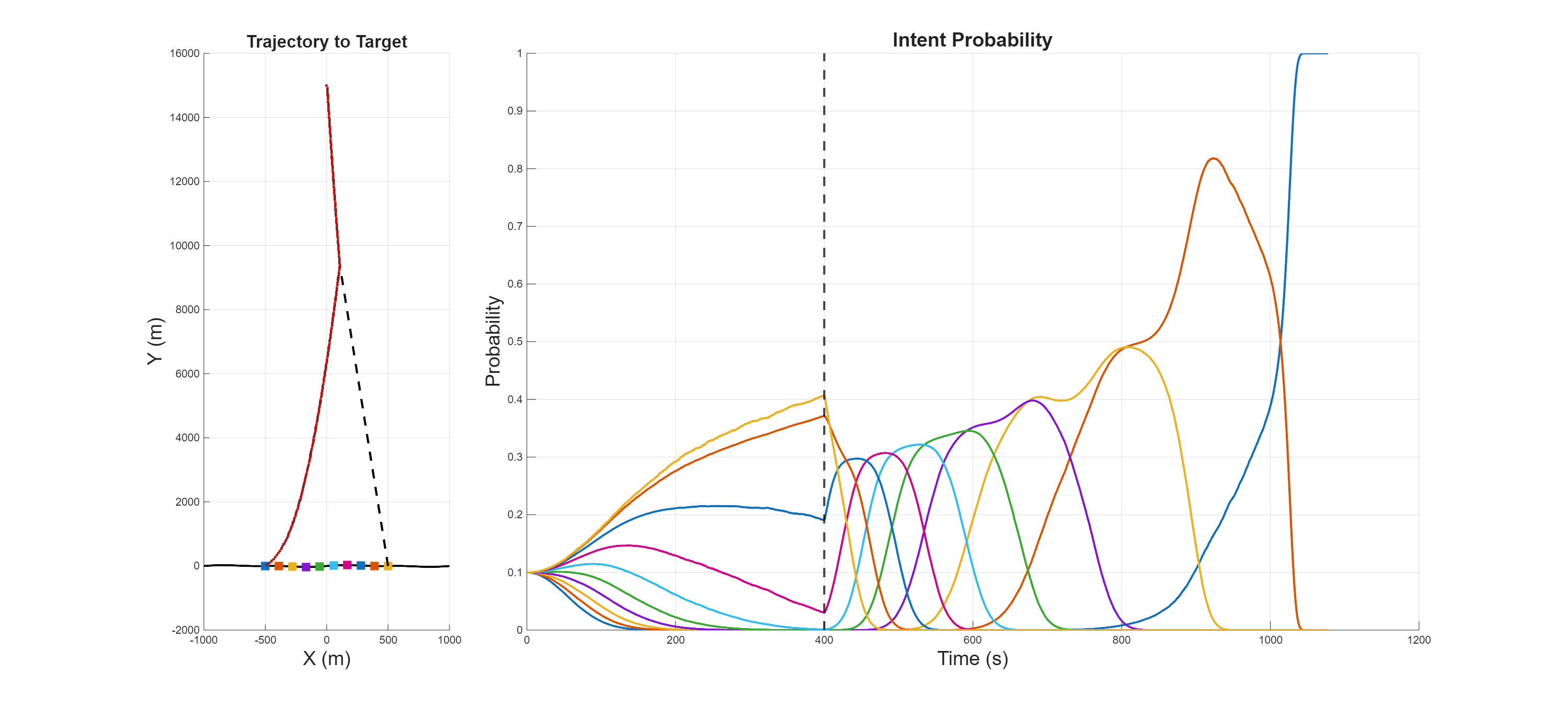
- Proved the inferred location was the one that was pursued.
- Introduced maneuvers to throw inference off, struggled when candidate positions were spaced close together.